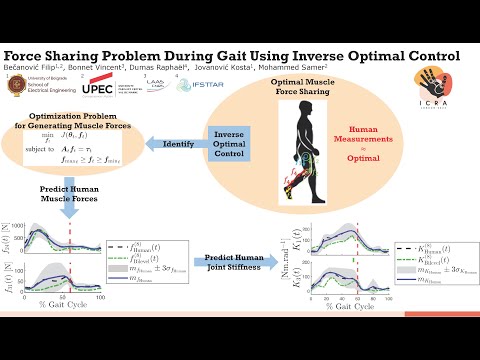
Presentation ICRA 2023 - Force sharing problem during gait using inverse optimal control
ICRA 2023 Presentation: Toward Exact Interaction Force Control for Underactuated Quadrupedal SystemsПодробнее

Understanding the Moment Curvature for RC and Composite SectionsПодробнее

ICRA 2023 - Agile Locomotion with Policy Transitions - Inventec AI CenterПодробнее

Presentation CDC 2022 - The quality of a set of basis functions for inverse optimal controlПодробнее

[ICRA 2023] Neural Optimal Control using Learned System DynamicsПодробнее
![[ICRA 2023] Neural Optimal Control using Learned System Dynamics](https://img.youtube.com/vi/WIbEY5rs60g/0.jpg)
ICRA 2023 Presentation: Covariance Steering for Uncertain Contact-Rich SystemsПодробнее

ICRA 2023 Experiment: Towards Exact Interaction Force Control for Underactuated Quadrupedal SystemsПодробнее

[ICRA 2023] Data-Driven SSM Reduction for Nonlinear Optimal Control of High-Dimensional RobotsПодробнее
![[ICRA 2023] Data-Driven SSM Reduction for Nonlinear Optimal Control of High-Dimensional Robots](https://img.youtube.com/vi/RYuKaXHyHmM/0.jpg)
Improving robot navigation in crowded environments using intrinsic rewards (ICRA 2023)Подробнее

Hybrid Learning of Time-Series Inverse Dynamics Models for Locally Isotropic Robot Motion— ICRA 2023Подробнее

It Takes Two: Learning to Plan for Human-Robot Cooperative Carrying ICRA 2023Подробнее

ICRA 2023 presentation: Indirect Force Control of a Cable-Suspended Aerial Multi-Robot ManipulatorПодробнее

ICRA 2021 Presentation · Inverse Dynamics vs. Forward Dynamics in Direct Transcription FormulationsПодробнее

(ICRA 2023) Foot Stepping Algorithm of Humanoids with Double Support Time AdjustmentПодробнее

ICRA'2021 Talk - General-Sum Multi-Agent Continuous Inverse Optimal ControlПодробнее

ICRA 2023: OpTaS - An optimization-based task specification library for trajectory optimizationПодробнее

Visual Part Segmentation for Inertial Parameter Identification of Manipulated Objects (ICRA 2023)Подробнее

ICRA 2023 DH final high resПодробнее
