[ICRA 2023] Data-Driven SSM Reduction for Nonlinear Optimal Control of High-Dimensional Robots
![[ICRA 2023] Data-Driven SSM Reduction for Nonlinear Optimal Control of High-Dimensional Robots](https://img.youtube.com/vi/RYuKaXHyHmM/0.jpg)
ICRA 2023: OpTaS - An optimization-based task specification library for trajectory optimizationПодробнее

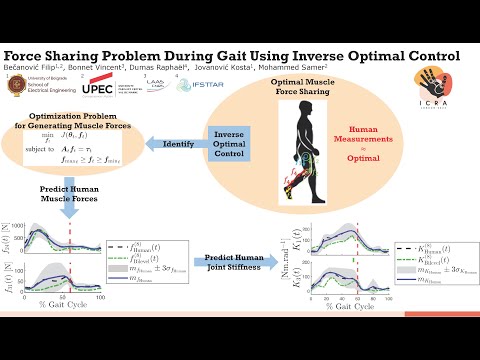
Presentation ICRA 2023 - Force sharing problem during gait using inverse optimal controlПодробнее
ICRA 2023 Autonomous Quadruped Robot Challenge (QRC) - DAY1 TrialsПодробнее

ICRA 2023 - Ensembles of Compact, Region-specific & Regularized SNNs for Scalable Place RecognitionПодробнее

[ICRA 2023] Discovering Multiple Algorithm ConfigurationsПодробнее
![[ICRA 2023] Discovering Multiple Algorithm Configurations](https://img.youtube.com/vi/r2426BR4r8o/0.jpg)
ICRA 2023 Hopping Robot with MPCПодробнее

A Global Max-Flow-Based Multi-Resolution Next-Best-View Method - The Presentation - ICRA 2023Подробнее

ICRA 2023- London, UKПодробнее

Benchmarking Potential Based Rewards for Learning Humanoid Locomotion - ICRA 2023Подробнее

HALO: Hazard Aware Landing Optimization for Autonomous Systems Demonstration (ICRA 2023)Подробнее

[ICRA 2023] Enforcing safety for vision-based controllers via Control Barrier Functions and NeRFsПодробнее
![[ICRA 2023] Enforcing safety for vision-based controllers via Control Barrier Functions and NeRFs](https://img.youtube.com/vi/BXh05217FJ4/0.jpg)
ICRA 2023: Multi-Target Pursuit by a Decentralized Heterogeneous UAV SwarmПодробнее

ICRA 2023 Talk: Curvature-Aware Model Predictive Contouring ControlПодробнее

ICRA 2023 - Graph Neural Networks for Multi-Robot Active Information AcquisitionПодробнее

Field Test of SLAMesh, ICRA 2023Подробнее

ICRA 2023 Talk: Multi-Robot Persistent Monitoring and Target DetectionПодробнее

ICRA 2023 Talk: Globally Guided Trajectory Planning in Dynamic EnvironmentsПодробнее

Weighted Maximum Likelihood for Controller Tuning (ICRA 2023)Подробнее
