Deep Reinforcement learning for real autonomous mobile robot navigation
EmoBipedNav: Emotion-aware Social Navigation for Bipedal Robots with Deep Reinforcement LearningПодробнее

Navigation Without Maps for Mobile Robots via Out-of-Distribution Deep Reinforcement LearningПодробнее

DeepXplore: Mobile Robot Navigation using Deep Reinforcement LearningПодробнее
Autonomous Navigation Breakthrough: SAC-L Framework with Collision ProbabilityПодробнее
AMR Navigation in Dynamic Real-World Environments Without Maps With Zero-Shot DRLПодробнее

Cooperative Deep Reinforcement Learning Policies for Autonomous Navigation in Complex EnvironmentsПодробнее

Sim-to-Real Transfer: Multi-Policy for Autonomous Navigation in Complex EnvironmentsПодробнее
Autonomous Robot Navigation in a Virtual Environment using Deep Reinforcement Learning with TD3Подробнее
Designing a Mapless Navigation Mobile Robot with Deep Q-Learning: Insights from Mr. ShinПодробнее
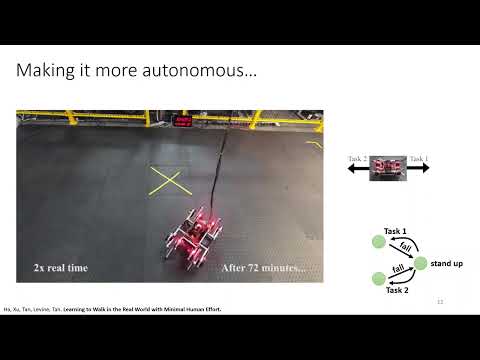
Making Real-World Reinforcement Learning PracticalПодробнее
Reinforcement learning for mobile robotПодробнее
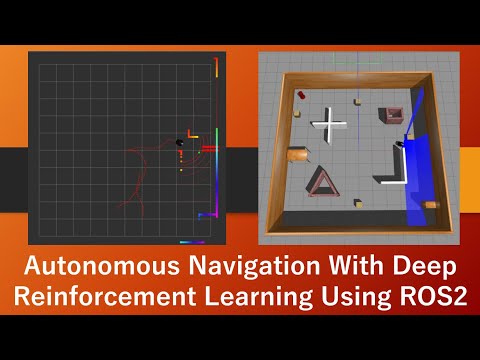
Autonomous Navigation with Deep Reinforcement Learning Using ROS2Подробнее
Reinforcement Learning for Robot Navigation with AFST in a Semi-Markov ModelПодробнее

Autonomous docking mission based on deep reinforcement learning(TD3)Подробнее

Intelligent Autonomous Navigation of Robots by Dr. Hyun MyungПодробнее

Champion-level Drone Racing using Deep Reinforcement Learning (Nature, 2023)Подробнее

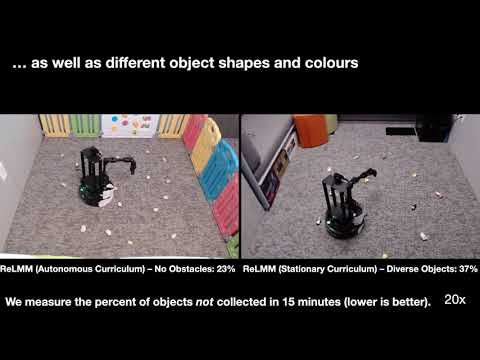
Fully Autonomous Real-World Reinforcement Learning with Applications to Mobile ManipulationПодробнее
Reinforcement Learning-based Mobile Robot NavigationПодробнее

[Demo] Transformable Gaussian Reward Function for Robot Navigation with Deep Reinforcement LearningПодробнее
![[Demo] Transformable Gaussian Reward Function for Robot Navigation with Deep Reinforcement Learning](https://img.youtube.com/vi/9x24k75Zj5k/0.jpg)
Deep Reinforcement Learning for Mapless Robot Navigation SystemsПодробнее