Deep Reinforcement Learning for Mapless Robot Navigation Systems
Consensus based Deep Reinforcement Learning for Mobile Robot Mapless NavigationПодробнее

Mapless Navigation System based on Deep Reinforcement Learning for Agriculture Mobile RobotsПодробнее
Deep Reinforcement Learning for Autonomous Map Less Navigation of a Flying RobotПодробнее
SRL-ORCA: A Socially Aware Multi-Agent Mapless Navigation Algorithm In Complex Dynamic ScenesПодробнее

An Improvement on Mapless Navigation with Deep Reinforcement Learning: A Reward Shaping ApproachПодробнее
Deep Reinforcement learning with Multiple Unrelated Rewards for AGV Mapless NavigationПодробнее

Designing a Mapless Navigation Mobile Robot with Deep Q-Learning: Insights from Mr. ShinПодробнее
Using Deep Reinforcement Learning with Curriculum Learning for Mapless Navigation in IntralogisticsПодробнее

APF-RL: Safe Mapless Navigation in Unknown Environments (ICRA)Подробнее

Virtual to real Deep Reinforcement Learning Continuous Control of Mobile Robots for Mapless NavigatiПодробнее
Goal Driven Autonomous Mapping Through Deep Reinforcement Learning and Planning-Based NavigationПодробнее

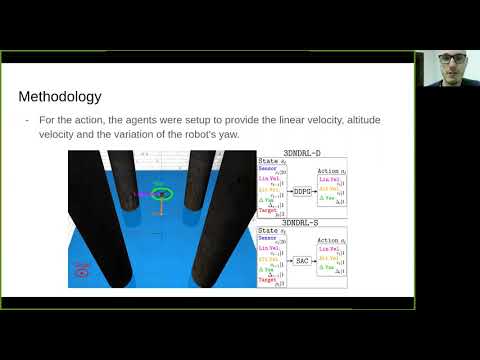
Deep Reinforcement Learning for Mapless Navigation of Unmanned Aerial Vehicles - LARS 2020Подробнее
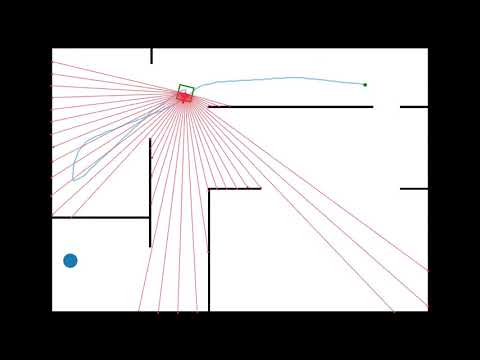
Mapless Navigation in static environment with DRL (Maze_4)Подробнее
Mapless Humanoid Navigation Using Learned Latent DynamicsПодробнее

ICRA 2021 - Deep Reinforcement Learning for Mapless Navigation of HUAUVs with Medium TransitionПодробнее
Curiosity driven Exploration for Mapless Navigation with Asynchronous Deep Reinforcement LearningПодробнее
Deep Reinforcement Learning for Mapless Navigation of Unmanned Aerial VehiclesПодробнее
Deep Reinforcement Learning for Mapless Navigation of a HUAUV with Medium TransitionПодробнее
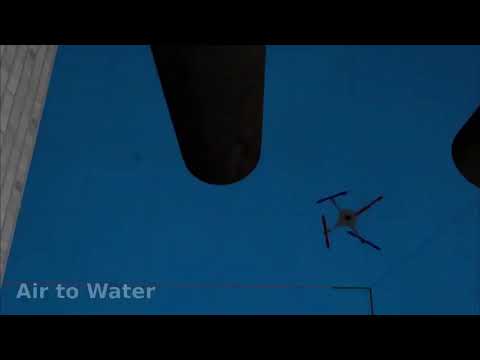
(ICRA 2021) Deep Reinforcement Learning for Mapless Navigation of a HUAUV with Medium TransitionПодробнее
