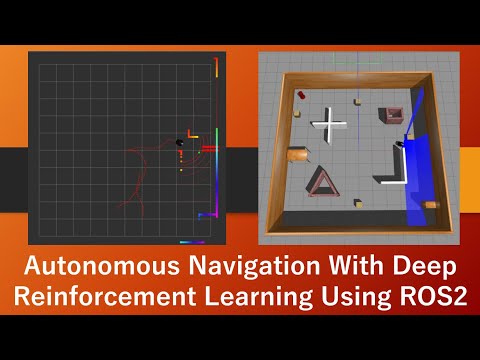
Autonomous Navigation with Deep Reinforcement Learning Using ROS2
Autonomous navigation using deep reinforcement learning with TurtleBotПодробнее

Nav 2 in ROS 2 for autonomous Navigation using SLAM for Indoor Mobile RobotsПодробнее

Autonomous Navigation Mobile Robot using ROS | Jetson Nano | RPLidar | Differential Drive KinematicsПодробнее

Deep reinforcement learning for autonomous navigation for UAV Drone in an indoor environmentПодробнее

Deep Reinforcement learning for real autonomous mobile robot navigationПодробнее

Robots Learn Autonomous Navigation using Deep Reinforcement Learning | Training | MARL SimulatorПодробнее

Autonomous Navigation of UAV by Using Real-Time Model-Based Reinforcement LearningПодробнее
