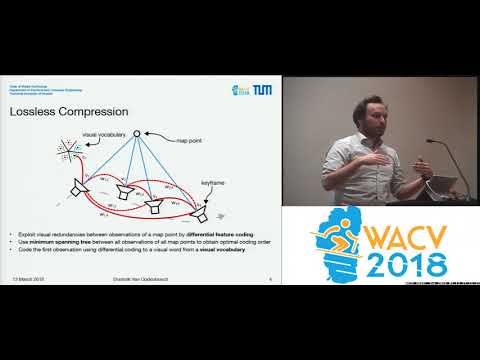
WACV18: Efficient Map Compression for Collaborative Visual SLAM
WACV18: Effective Combination of Vertical and Horizontal Stereo VisionПодробнее

Vegetation Tools HDA (Houdini Digital Asset )Подробнее

Decentralized Multi-Agent Visual SLAM (Ph.D. Defense of Titus Cieslewski)Подробнее

3D Collaborative SLAM DemoПодробнее

How to Build 3D Maps for Data Visualization Like a Pro?Подробнее

WACV18: Detect-SLAM: Making Object Detection and SLAM Mutually BeneficialПодробнее

Towards Globally Consistent Visual-Inertial Collaborative SLAMПодробнее

COVINS: Visual-Inertial SLAM for Centralized CollaborationПодробнее

Visual SLAM (indoor and outdoor)Подробнее

Keep it brief: Scalable creation of compressed localization mapsПодробнее

Outdoor SLAM — Positioning & Semantic Environment AnalysisПодробнее

WACV18: Minimal Non-linear Camera Pose Estimation Method Using Lines for SLAM ApplicationsПодробнее

Schmidt-EKF VI-SLAMПодробнее

Map Management for Efficient Long-Term Visual Localization in Outdoor EnvironmentsПодробнее

CCM-SLAM: Robust and efficient Centralized Collaborative Monocular SLAM for robotic teamsПодробнее
