PL-EVIO: Robust Monocular Event-based Visual Inertial Odometry with Point and Line Features

PL-EVIO: Robust Monocular Event-based Visual Inertial Odometry with Point and Line FeaturesПодробнее

Real-time Visual-Inertial Odometry for Event Cameras using Keyframe-based Nonlinear OptimizationПодробнее

ROVIO: Robust Visual Inertial OdometryПодробнее

Monocular Visual-Inertial Odometry with Planar Regularities - DemonstrationПодробнее

IROS 2022 Event-based Visual Inertial Odometry (EVIO)Подробнее

ESVIO: Event-based Stereo Visual Inertial OdometryПодробнее

Multi Camera Visual Inertial Odometry - Lintong Zhang #ICRA2022Подробнее

Leveraging Planar Regularities for Point Line Visual-Inertial OdometryПодробнее

Leveraging Structural Information to Improve Point Line Visual-Inertial OdometryПодробнее

Learning Inertial Odometry for Dynamic Legged Robot State EstimationПодробнее

MobiCam Indoor Video Camera - Best 2 Way Baby Monitor with Night Vision & More!Подробнее

Low-Latency Visual Odometry using Event-based Feature TracksПодробнее

Monocular Visual Odometry using OpenCVПодробнее

Exploring Event Camera-based Odometry for Planetary Robots (RAL-IROS 2022)Подробнее

Direct Visual-Inertial Odometry with Stereo CamerasПодробнее

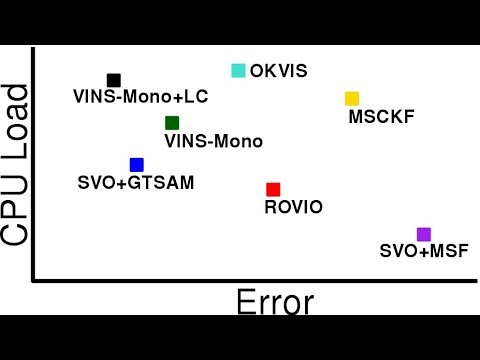
A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying RobotsПодробнее
DVIO: Depth Aided Visual Inertial Odometry for RGBD SensorsПодробнее

Direct Line Guidance OdometryПодробнее
