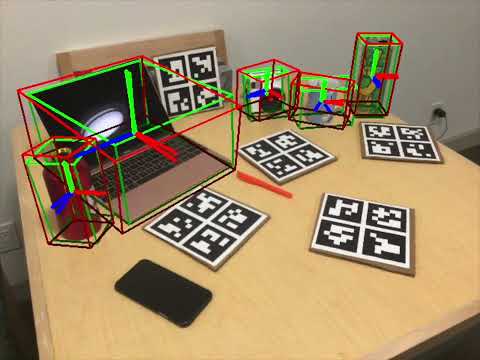
6D Pose Estimation For Textureless Objects On RGB Frames Using Multi-View Optimization

Jun Yang on 6D Pose Est. for Textureless Objects on RGB Frames using MV. Optimization | AIR SeminarПодробнее

Multi-view Self-supervised Deep Learning for 6D Pose Estimation in the Amazon Picking ChallengeПодробнее

6D Pose Estimation with Combined Deep Learning and 3D Vision TechniquesПодробнее

RGB-based Category-level Object Pose Estimation via Decoupled Metric Scale RecoveryПодробнее
6D Multi-Object Pose Estimation Using CASAPose Deep Learning ModelПодробнее

MoreFusion: Multi-object Reasoning for 6D Pose Estimation from Volumetric FusionПодробнее

ContourPose: Monocular 6-D Pose Estimation Method for Reflective Textureless Metal PartsПодробнее

Object 6d Pose EstimationПодробнее

RGB camera-based object 6D pose predictionПодробнее

RePOSE: Fast 6D Object Pose Refinement via Deep Texture RenderingПодробнее

AIRLab Talks: Robust, Real-time 6D Pose Estimation and Tracking for Robot ManipulationПодробнее

End2End Multi-View Feature Matching with Differentiable Pose Optimization (ICCV'2023)Подробнее

Computer Vision, Deep Machine Learning technique, Object Identification and Pose Estimation.Подробнее

HybridPose: 6D Object Pose Estimation Under Hybrid RepresentationsПодробнее

Deep Fusion for multi-modal 6D Pose EstimationПодробнее

ICRA 2022: VisuoTactile 6D Pose Estimation of an In-Hand Object Using Vision and Tactile Sensor DataПодробнее

Multiple View Articulated Pose EstimationПодробнее

Pose estimation of a textureless 3D object with MegaPoseПодробнее

Pseudo Flow Consistency for Self-Supervised 6D Object Pose Estimation (ICCV 2023)Подробнее
