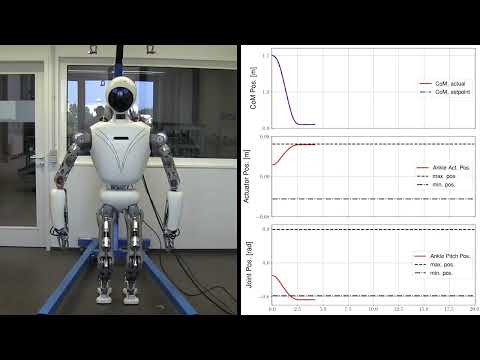
Whole-Body Control of Humanoid Robot in Irregular Dual Contact Stance

An Approach to Combine Balancing with Hierarchical Whole-Body Control for Legged Humanoid RobotsПодробнее

Humanoid Self-Collision Avoidance Using Whole-Body Control with Control Barrier FunctionsПодробнее

ICRA 2022 Presentation: "Whole-Body Control of Series-Parallel Hybrid Robots"Подробнее

Best Humanoid Robots at CES2025Подробнее

Kei Okada (University of Tokyo)- Whole body control of JSK humanoid robots (without Motion Planning)Подробнее

Analyzing Whole-Body Pose Transitions in Multi-Contact MotionsПодробнее

Humanoids 2014 - Multiple Task Optimization using DMPs for Whole Body ControlПодробнее

SupraPeds: Humanoid Contact-Supported Locomotion for 3D Unstructured EnvironmentsПодробнее

HOAP-3 humanoid robot: Task-based whole-body control of humanoid robots with ZMP regulation.Подробнее

Fast Whole-Body Motion Control of Humanoid Robots with Inertia ConstraintsПодробнее

Precious footage of humans "bullying" robots in the early days of humanoid.Подробнее

Computationally Efficient Prioritized Whole-Body Controller with Contact ConstraintsПодробнее

Talk: From Model-Based Whole-Body Control to Humanoid Legged Manipulation using MLПодробнее

Olivier Stasse: Motion generation for humanoid robots from motion planning to whole body controlПодробнее

Whole Body Control of Humanoid RobotПодробнее

Whole-Body MPC for a Dynamically Stable Mobile ManipulatorПодробнее

Whole-body motion control 2Подробнее

ExBody2: Advanced Expressive Humanoid Whole-Body ControlПодробнее

Whole-Body Control of Series-Parallel Hybrid RobotsПодробнее