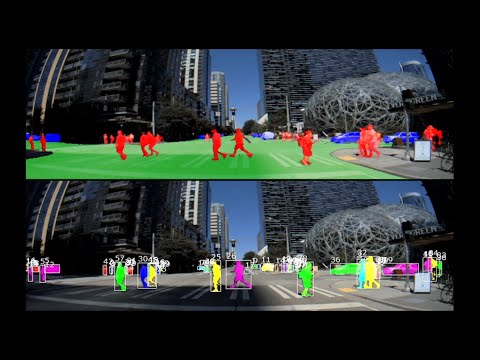
Using Semantic Segmentation to detect different objects in a Autonomous Vehicles environment

Lidar Data Processing for Autonomous SystemsПодробнее

Object Classification Using CNN Based Fusion of Vision and LIDAR in Autonomous Vehicle EnvironmentПодробнее

Self-Driving Cars: Perception - Part 2 (Jens Behley)Подробнее

Computer Vision and Perception for Self-Driving Cars (Deep Learning Course)Подробнее

From nuScenes to nuPlan: Benchmarking for Progress in Autonomous DrivingПодробнее

Self-Driving Cars: Unsupervised Learning for Vehicles Perception (Lucas Nunes)Подробнее

Waymo at ECCV 2022 | Scaling 3D Detection to the Long TailПодробнее

Efficient 3D Perception for Autonomous Vehicles Zhijian Liu MITПодробнее

NITC Webinar: Radar Point Cloud Segmentation using GMM in Traffic MonitoringПодробнее

Object detection vs Semantic Segmentation for Autonomous carsПодробнее

Label Efficient Visual Abstractions for Autonomous DrivingПодробнее

Drago Anguelov – Machine Learning for Autonomous Driving at ScaleПодробнее
Mobile Asset Detection & Semantic Segmentation for Autonomous Vehicle SystemsПодробнее

Introduction to Photogrammetry (Cyrill Stachniss, 2021)Подробнее

CV3DST - IntroductionПодробнее
Keynote Talk by C. Stachniss on LiDAR-based SLAM using Geometry and Semantics ... (ITSC'20 SLAM-WS)Подробнее

How AI Helps Autonomous Vehicles See Outside the Box - NVIDIA DRIVE Labs Ep. 14Подробнее
Embedded visual perception for autonomous lawn mowers using ... Semantic segmentationПодробнее
