ROS - UAV exploration in unknown environment and QR detection

Autonomous Precision Landing of a UAV | ROS NoeticПодробнее

ROS Navigation stack and QR codeПодробнее

Simulation of drones reading QR codes on the flyПодробнее

ROS Quadrotor Navigating an Unknown Environment DemoПодробнее

qr code detection on ROSПодробнее

ROS Drone with gazebo (precision landing using QR Code)Подробнее

ROS QR Code HDПодробнее

QR Code Detection + ROS Gmapping (2)Подробнее

exploration with evarobot in gazeboПодробнее

SJTU_Drone/Apriltag_controllerПодробнее

An Autonomous UAV System for Fast Exploration of Large Complex Indoor EnvironmentsПодробнее

Jason-ros UAVs Search and rescue missionПодробнее

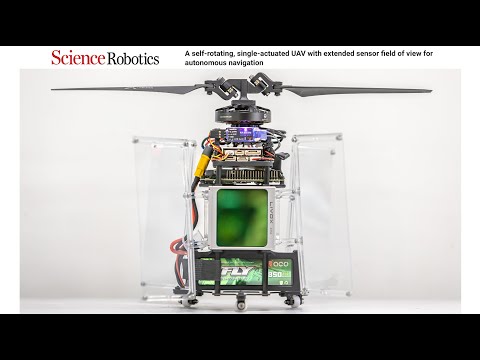
A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigationПодробнее
Autonomous Docking of Robomuse 4.0 using QR Codes (ROS)Подробнее

Indoor Autonomous UAV Exploration Planning TestПодробнее

UAV-UGV ExplorationПодробнее
