Robotics Lec 3: Coordinate transformations (Rotation, Translation) (Fall 2022)

Translation and Rotation Matrix - HEBI Robotics - Robotics Lecture SeriesПодробнее

Fastest 100 meters by a bipedal robot - 24.73 seconds 🤖Подробнее

The Robots Are ComingПодробнее

BEST DEFENCE ACADEMY IN DEHRADUN | NDA FOUNDATION COURSE AFTER 10TH | NDA COACHING #shorts #nda #ssbПодробнее

Spatial Descriptions and Transformation Matrices for Robotic ManipulatorsПодробнее
Robotics Lec03: Coordinate Frames and Homogenous Transformations (Fall 2023)Подробнее

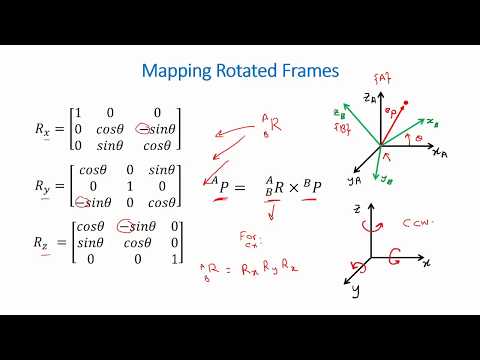
Coordinate Transformations in 2D | Mapping | Robotics 101Подробнее
Introduction to Rotation Matrices in RoboticsПодробнее

This robot will be mass produced by 2025 #robotics #shortsПодробнее

Lecture 3: MIT 6.800/6.843 Robotic Manipulation (Fall 2021) | "Basic pick and place (Part 1)"Подробнее

Build Your Own Wearable RobotПодробнее

Lecture 3: MIT 6.4210/6.4212 Robotic Manipulation (Fall 2022) | "Basic pick and place (Part 1)"Подробнее

Robotics Lec27: Homogenous Transformations (Fall 2020)Подробнее

Rotation Matrix (Part 2) | Coordinate Transformations | Robotics 201Подробнее

Introduction to Homogeneous Transforms in RoboticsПодробнее
