Python Tutorial: Inverse Dynamics (with Lagrangian) of 2-Link RP Robot Arm using SymPy and NumPy

SymPy Tutorial (2022): For Physicists, Engineers, and MathematiciansПодробнее

Solving Systems Of Equations Using Sympy And Numpy (Python)Подробнее
Python Tutorial: Inverse Dynamics of 3-Link RRR Articulated Arm using SymPy and NumPyПодробнее

Python module sympy in 3d kinematics - an exampleПодробнее

Passive Inverse Dynamics Control using a Global Energy Tank for Torque Controlled Humanoid Robots inПодробнее

Python Calculator (IS218 Midterm)Подробнее

StudentProject - Robot Arm Technical Vision / Python / OpenCV Raspberry Pi / 4 / 6 DoFПодробнее

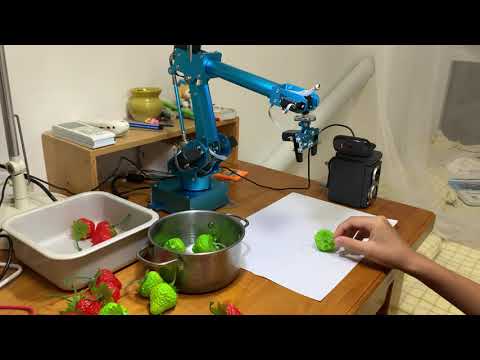
A demo of agriculture robot. Robotic arm + Raspberry PI + Python + OpenCV.Подробнее