OpenCV Disparity Mapping // 2020 Quest

How to do Stereo Vision and Depth Estimation with OpenCV C++ and PythonПодробнее

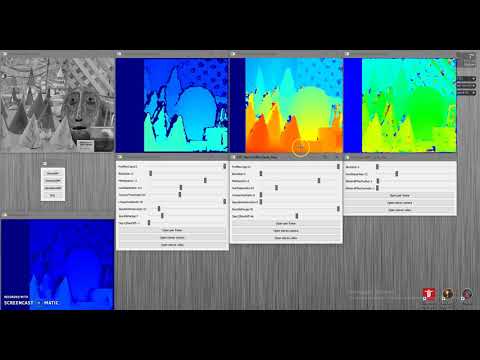
3D Stereo Depth Vision with 2 Cameras - OpenCV Python TutorialПодробнее

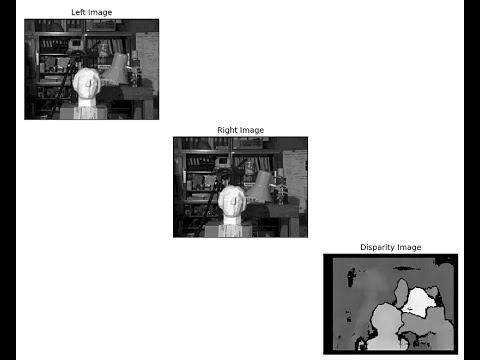
Depth image, Disparity map, and Stereo Vision: python (computer vision by OpenCV) شرح الرؤية بالحاسبПодробнее

Disparity of stereo images with Python and OpenCVПодробнее

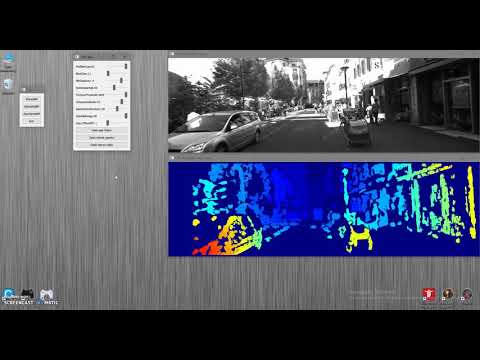
HOT Color Map - OpenCV Disparity Map with post-filtering on KITTI DatasetПодробнее

OpenCV: Stereo Vision Disparity (Depth Map)Подробнее
OpenCV Stereo DisparityПодробнее

Realtime Disparity Map with OpenCVПодробнее

Depth Estimation with OpenCV Python for 3D Object DetectionПодробнее
Building a Depth Estimation System with Stereo Vision and OpenCV C++Подробнее

OpenCV Disparity Map with post-filtering on KITTI DatasetПодробнее

Disparity map algorithm comparisonПодробнее
OpenCV Python Depth Map Stereo VisionПодробнее
Disparity Map Computation Results Using OpencvПодробнее

A Complete Guide to Depth Maps in OpenCV Python with Stereo VisionПодробнее
Stereo vision in OpenCV (disparity map)Подробнее

Disparity map CPU StereoBMПодробнее