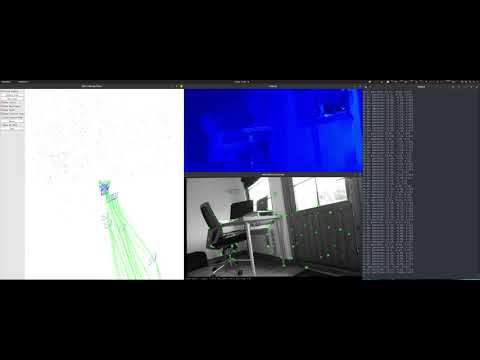
OAK-D + RPLidar - SLAM, Object Detection Demo

Lidar and OAK-D-Lite co-work demo: Lidar SLAMПодробнее

Visual SLAM with OakD S2 with Nvidia ElbrusПодробнее

OAK-D / ORB_SLAM3 DemoПодробнее
RPLIDAR Hector SLAM DemoПодробнее

Lidar and OAK-D-Lite co-work demo: OpenCV object trackingПодробнее

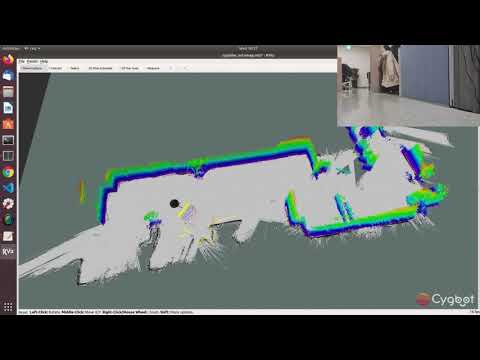
Lidar and OAK-D-Lite co-work demo: Lidar NavigationПодробнее

Object Detection using OAK-D with Custom DatasetПодробнее

SLAM and relocalization tests on OAK-D & RealSenseПодробнее

Object detection using a USB camera and a RPLIDAR A1.Подробнее

KudanSLAM: SLAM tech demoПодробнее

HAP Slam and Detection DemoПодробнее

Depth by OAK-D-LITE and TensorRTПодробнее

Robust 3D SLAM and Navigation Demo in Dynamic Environments on a Mobile PlatformПодробнее

Demo for using RPlidar A2 with move_base and gmapping on ROSПодробнее

2D / 3D Dual SLAM Robot using ROS and LiDAR with Raspberry PiПодробнее
Visual Slam and Object IDПодробнее

Depth Sensing + CNN on OpenCV OAK-D in Real-time!!Подробнее

RPLidar and Hector SLAM for Beginners | ROS Tutorial #8Подробнее
Object Detection and Mapping using Yolov3 and SLAM Algorithm on 3WD Robot with RPLiDAR A1Подробнее
