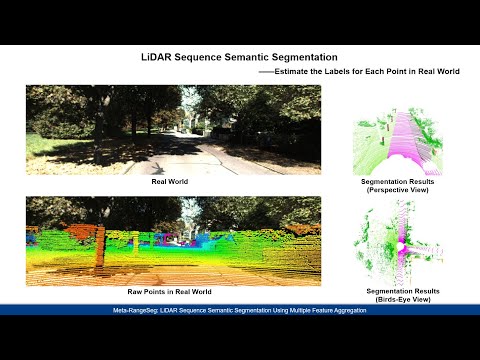
Meta-RangeSeg: LiDAR Sequence SemanticSegmentation Using Multiple Feature Aggregation
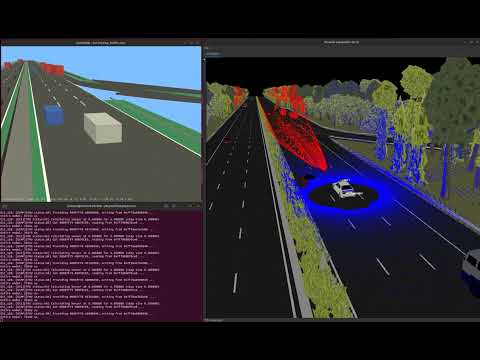
Simspector: Multiple Lidar SensorsПодробнее
Road Scene Module | 15 Rotation by Feature Attribute LiDAR SoftwareTutorialПодробнее
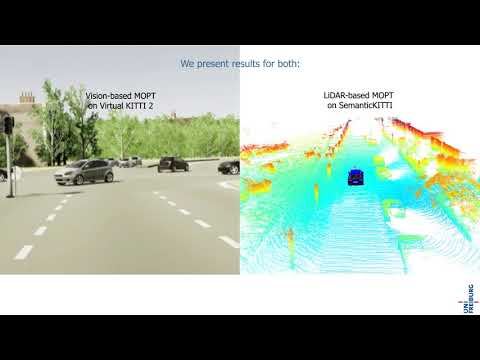
MOPT: Multi-Object Panoptic TrackingПодробнее
Boosting Multimodal LLM Reasoning with Step-wise RLПодробнее
Classification Of Urban Point Clouds Using 3D CNNsПодробнее
LiDAR360 MLS | Semantic Segmentation Results and Object Segmentation ResultsПодробнее
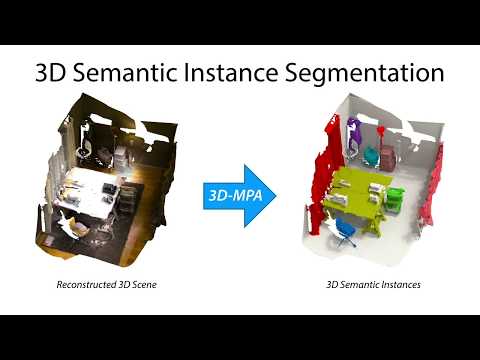
3D-MPA: Multi Proposal Aggregation for 3D Semantic Instance Segmentation (CVPR 2020)Подробнее
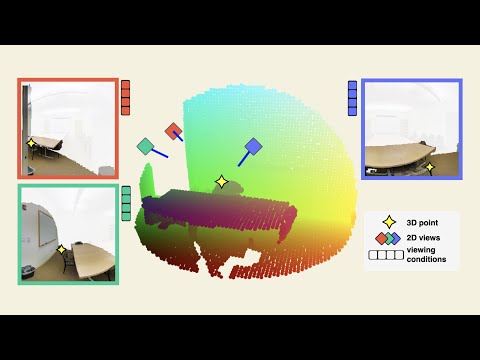
Learning Multi-View Aggregation In the Wild for Large-Scale 3D Semantic SegmentationПодробнее
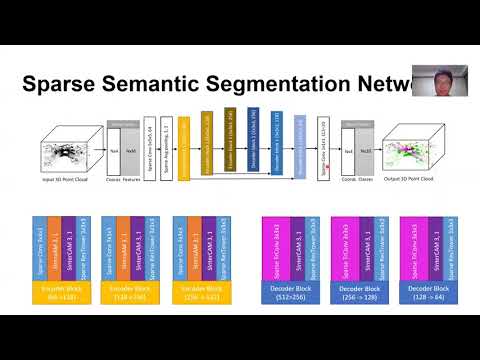
S3Net: 3D LiDAR Sparse Semantic Segmentation NetworkПодробнее
SHREC2020: 3D Point Cloud Semantic Segmentation for Street ScenesПодробнее
Meta Data Management: Navigation Routes and POIsПодробнее

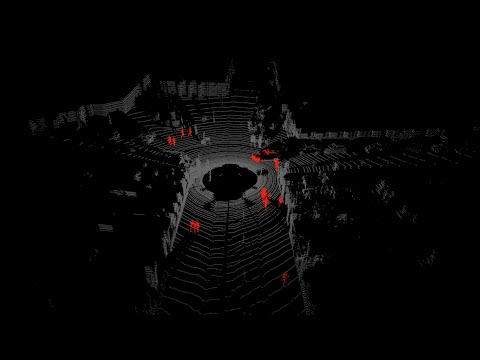
[IROS22] Efficient Spatial-Temporal Information Fusion for LiDAR-Based 3D Moving Object SegmentationПодробнее
![[IROS22] Efficient Spatial-Temporal Information Fusion for LiDAR-Based 3D Moving Object Segmentation](https://img.youtube.com/vi/kao26zX1Hdo/0.jpg)
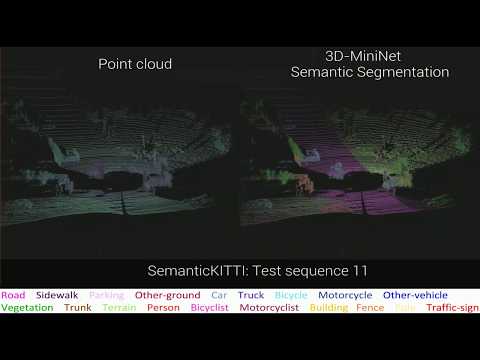
3D-MiniNet predictions on the SemanticKitti test sequence 11Подробнее
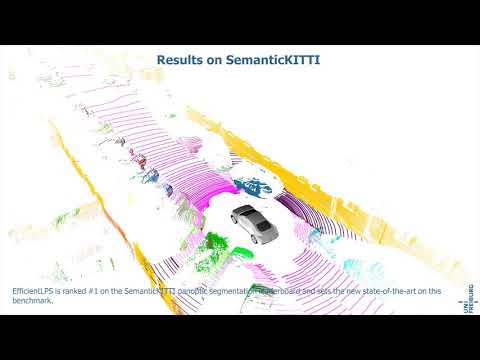
EfficientLPS: Efficient LiDAR Panoptic SegmentationПодробнее
PointSeg: Real-Time Semantic Segmentation Based on 3D LiDAR Point CloudПодробнее
RAL-IROS'22 Results: Receding Moving Object Segmentation in 3D LiDAR Data Using Sparse 4D Conv...Подробнее
Survey Lite Using Mobile Lidar and Panorama VideographyПодробнее