Marker based Thermal-Inertial Localization for Aerial Robots in Obscurant Filled Environments

Drone marker detection testПодробнее

[2018 Mar] Bebop Marker based Navigation and LandingПодробнее
![[2018 Mar] Bebop Marker based Navigation and Landing](https://img.youtube.com/vi/id5Ku3HD5_E/0.jpg)
Radiation Source Localization in GPS-Denied Environments Using Aerial RobotsПодробнее

Keyframe-based Direct Thermal-Inertial OdometryПодробнее

Thermal-Inertial Localization for Autonomous Navigation of Aerial Robots through ObscurantsПодробнее

Robust Thermal-Inertial Localization for Aerial Robots: A case for Direct MethodsПодробнее

Robot Localization from Fiducials TestПодробнее

Keyframe-based Thermal-Inertial OdometryПодробнее

Fiducial marker ArUco: Localization with single marker referenceПодробнее

Ground and Aerial Mutual Localization Using Anonymous Relative-Bearing MeasurementsПодробнее

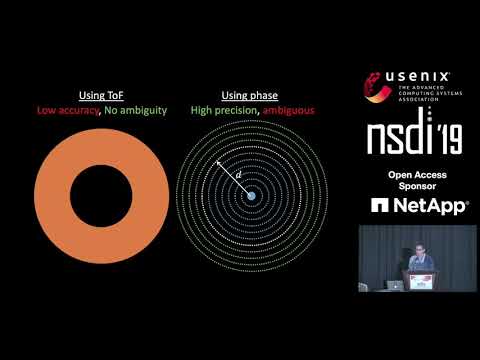
NSDI '19 - 3D Backscatter Localization for Fine-Grained RoboticsПодробнее
Haptic Feedback-based Reactive Navigation for Aerial Robots with failed LocalizationПодробнее

Formation of micro aerial vehicles using relative visual localizationПодробнее

Localization for a camera-cluster-equipped autonomous vehicle using one fiducial markerПодробнее

Complementary Multi-Modal Sensor Fusion for Resilient Pose Estimation in Subterranean EnvironmentsПодробнее

Radiation Source Localization in GPS-denied Environments using Aerial RobotsПодробнее
