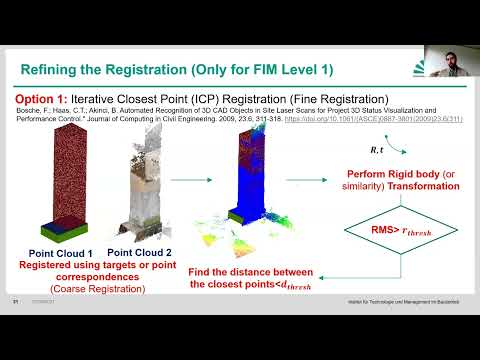
Iterative closest point algorithm
05. Курс фотограмметрии: сопоставление 3D облаков точек (LIDAR, SHOT, ICP)Подробнее

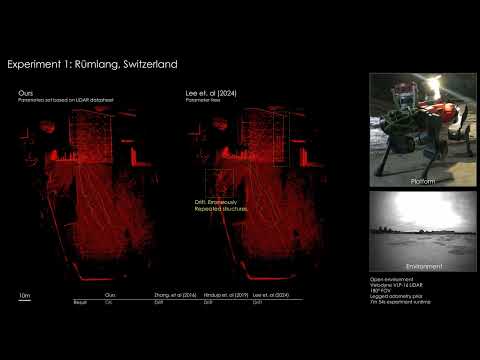
OpenLiDARMap - Zero-Drift Point Cloud Mapping using Map Priors - v0.2.1Подробнее

ch12 slam for robotics iterative closest point icp algorithmПодробнее

KISS-ICP - GLO-7021Подробнее

LIDAR Scan Matching con Algoritmo ICP | Robótica MóvilПодробнее
OpenLiDARMap - Zero-Drift Point Cloud Mapping using Map PriorsПодробнее

Point Cloud Visualization using Open3d and PythonПодробнее
3d position estimation of a known object using aПодробнее
Lecture 9.1 ICP Registration in CloudCompareПодробнее
Probabilistic Degeneracy Detection for Point-to-Plane Error MinimizationПодробнее
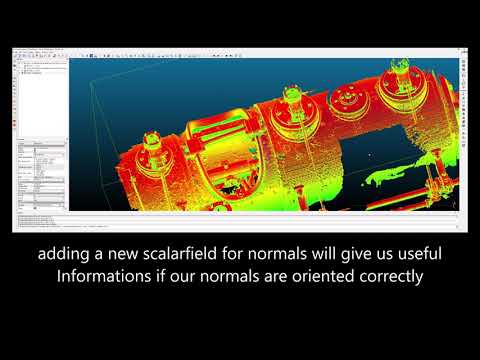
Tutorial: Basic Knowledge in CloudCompareПодробнее
Pose-based EKF SLAM for Robot Localization Simulation(including Planning, Exploration, Navigation)Подробнее
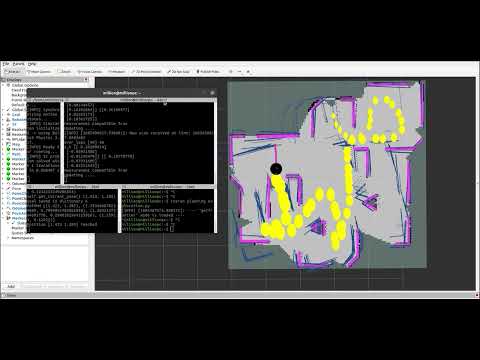
Pose-based EKF SLAM for Robot Localization (including Planning, Exploration, Navigation)Подробнее

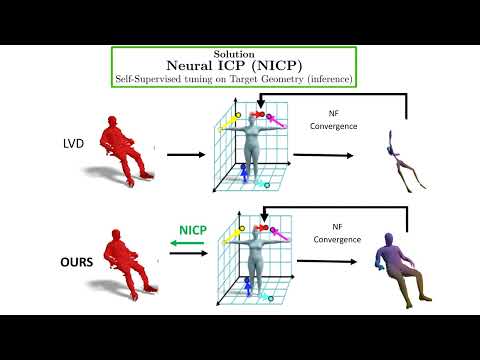
NICP: Neural ICP for 3D Human Registration at ScaleПодробнее
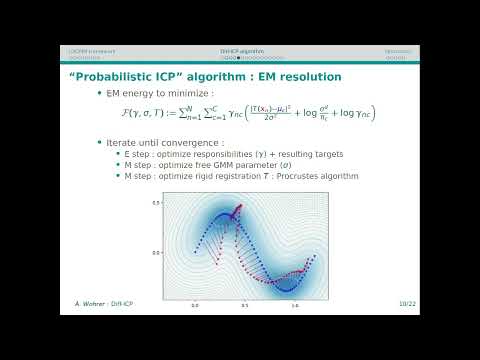
Diffeomorphic ICP registration for single and multiple point setsПодробнее
Working Stream.Iterative closest point registration(Won't reply the comment real-time)Подробнее

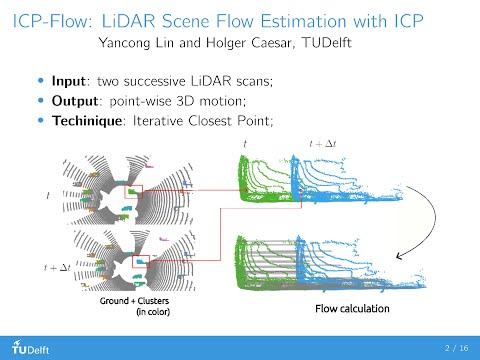
ICP-Flow: LiDAR Scene Flow Estimation with ICP, CVPR24Подробнее
High Performance Computing for Cyber Physical Systems: Lecture 7Подробнее

kNN-Res: Residual Neural Network with kNN-Graph coherence for point cloud registration -Подробнее

Working Stream.Iterative closest point registration(Won't reply the comment real-time)Подробнее