IROS 2020 Real-Time Multi-SLAM System for Agent Localization and 3D Mapping in Dynamic Scenarios

Real-Time Multi-SLAM system for Agent Localization and 3D Reconstruction IROS 2020Подробнее

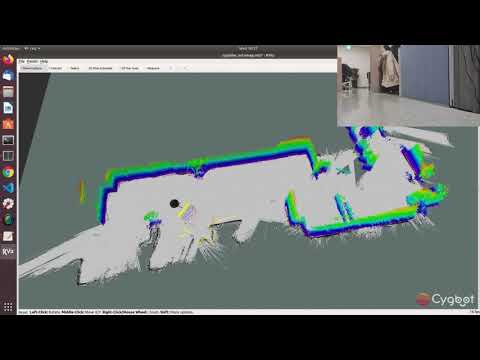
YUJIN SLAM + YUJIN 3D LiDAR (YRL3-25) : Map BuildingПодробнее

Robotic Localization and Multi-Senor 3D Mapping for Exploration of Subsurface VoidsПодробнее

Simultaneous Localization and Mapping (SLAM)Подробнее

IROS 2020 Talk - Dual SLAM: A framework for robust single camera navigationПодробнее

2D / 3D Dual SLAM Robot using ROS and LiDAR with Raspberry PiПодробнее
IROS 2020 Presentation · Dynamic Trajectories Robust to DisturbancesПодробнее

The Hilti SLAM Challenge Dataset (RAL-IROS 2022)Подробнее

Autonomous Spot: Long-Range Exploration of Extreme Environments (IROS 2020 Talk)Подробнее

Augmenting Visual Place Recognition with Structural Cues (RAL/IROS 2020)Подробнее

IROS 2020 Demo: Pi-Map_A Decision-Based Sensor Fusion with Global Optimization for Indoor MappingПодробнее

APPLD @ IROS 2020Подробнее

Speed and Memory Efficient Dense RGB-D SLAM in DynamicScenes (IROS 2020)Подробнее

Multi-agent graph SLAM with GTSAMПодробнее

Kimera-Multi: a System for Distributed Multi-Robot Metric-Semantic SLAMПодробнее

Demo #8 - Homomorphic Encryption-based Federated Learning Anomaly Detector SystemПодробнее

Learning Depth with Very Sparse Supervision (IROS 2020 Pitch Video)Подробнее

Sim-to-real reinforcement learning control of a pendubot.Подробнее
