Hybrid A* Path Planning without Search Visualization

Hybrid A-Star Path Planning - Autonomous CarПодробнее

Hybrid A* Path Planning with Search VisualizationПодробнее

Hybrid A * parking path planningПодробнее

path planning for intelligent car with 3D hybrid A*Подробнее

Hybrid A* motion planning in a dynamic environmentПодробнее

Hybrid A* Path PlanningПодробнее

Path Planning with a Hybrid A* Algorithm and Sensor FusionПодробнее

Dubin's Heuristic in a Hybrid A* AlgorithmПодробнее

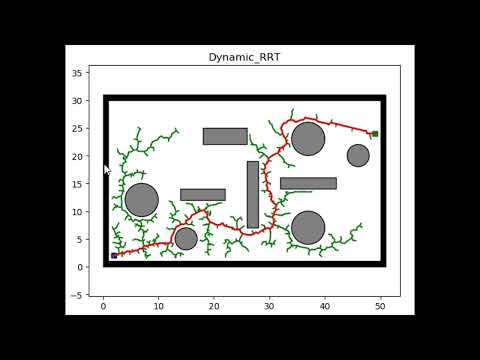
Simple path planning using heuristic A* in dynamic environmentПодробнее

A* in Action - Artificial Intelligence for RoboticsПодробнее

RRT path planning in TP-Space for hybrid navigationПодробнее

Gazebo Simulation - Path Planning using Hybrid State A* and Tracking using a Stanley ControllerПодробнее

Different Path Planning algorithms used in Robotics with AnimationsПодробнее
Deep Learning CarsПодробнее

Path planning in robotic vehicles using hybrid-state A* - DemoПодробнее

Real-time Hybrid A* Motion Planning in a Complicated Maze with ReversingПодробнее

Path Planning with A* and RRT | Autonomous Navigation, Part 4Подробнее
particle swarm optimisation (PSO) algorithm in 30secsПодробнее
