Grasping Trajectory Optimization with Point Clouds

Grasping Trajectory Optimization with Point Clouds (IROS 2024)Подробнее

Fast geometry-based computation of grasping points on three-dimensional point cloudsПодробнее

Dex-Net 3.0: Computing Robust Vacuum Suction Grasp Targets in Point Clouds Using a New Analytic ModeПодробнее

Fast geometry-based computation of grasping points on three-dimensional point cloudsПодробнее

Grasp Planning: Grasp Trajectory OptimizationПодробнее

Using Geometry to Detect Grasps in 3D Point CloudsПодробнее

Trajectory Optimization for Dynamic Grasping in Space using Adhesive GrippersПодробнее

Object grasping using deep learning and point cloudПодробнее

Relaxed-Rigidity Constraints: In-Grasp Manipulation using Purely Kinematic Trajectory OptimizationПодробнее

Robot Grasping with Unscented Bayesian OptimizationПодробнее

Approximating shapes, positions and sizes from point cloud data for robotic grasping - Paul DanielПодробнее
6.843 Final Project - Soft Catching of a Projectile via Trajectory OptimizationПодробнее

Robot object graspingПодробнее

MIT Robotics - Jeffrey Ichnowski - Dynamic Robot ManipulationПодробнее

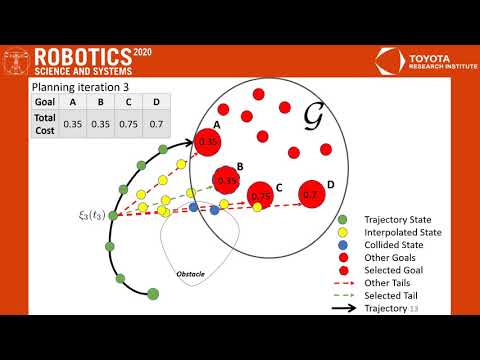
RSS 2020, Spotlight Talk 33: Manipulation Trajectory Optimization with Online Grasp Synthesis and...Подробнее
Control and Trajectory Optimization for Soft Aerial ManipulationПодробнее

Machine Learning and Optimization for RoboticsПодробнее

GOMP: Grasp-Optimized Motion PlanningПодробнее

[IROS2023] Exact Point Cloud Downsampling for Fast and Accurate Global Trajectory OptimizationПодробнее
![[IROS2023] Exact Point Cloud Downsampling for Fast and Accurate Global Trajectory Optimization](https://img.youtube.com/vi/na7KVtsTKMc/0.jpg)