c15 5, Пространство состояний: каноническая форма наблюдаемости

c15 4, Пространство состояний: каноническая форма управляемостиПодробнее

Метод пространства состояний САУ: описание конкретной системыПодробнее

c15 1, Пространство состояний: представлениеПодробнее

Управляемость и наблюдаемость | Утро с теорией управления, лекция 7Подробнее

Теория автоматического регулирования. Лекция 5. Модели параметров состоянийПодробнее

c15 2, Пространство состояний: пространство состояний передаточная функцияПодробнее

c15 3, Пространство состояний: реализуемостьПодробнее

c16 3, Управляемость и наблюдаемость: управляемость, приведение к КФУПодробнее

c16 1, Управляемость и наблюдаемость: управляемость, определение и критерийПодробнее

MPCАТ23 Лекция 1 1 пространство состоянийПодробнее

Двухпроводная схема смены направленияПодробнее

Разработка высокоуровневых моделей комплекса бортовых систем самолёта транспортной категорииПодробнее

Автоматическое торможение перед препятствием спереди (FCA)Подробнее

MPC23AA Лекция 1 пространство состоянийПодробнее

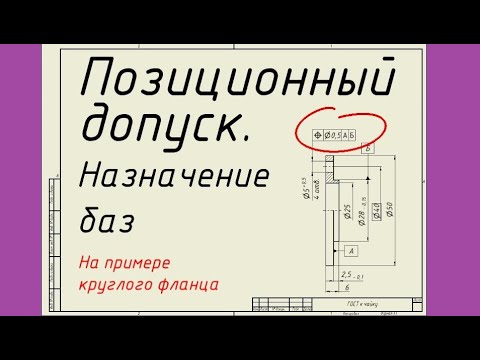
Позиционный допуск. Назначение баз на примере круглого фланца. Лекция 22Подробнее
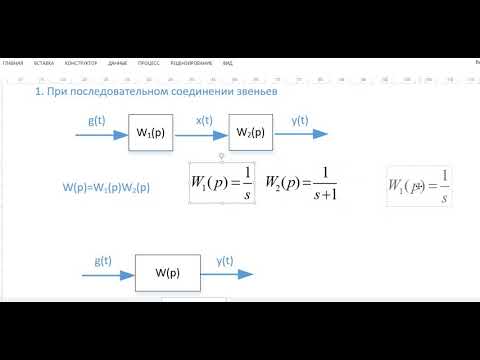
Преобразование структурных схем систем управленияПодробнее
Лекция 5. Оценивание изменяющихся параметров. Фильтры Винера и КалманаПодробнее

ПРАКТИКА # 5. ТММ. Как построить план положений механизма.Подробнее
